Роботизированный вездеход R1 протестирован на симуляторе Луны
Лунный роботизированный вездеход R1 японского стартапа GITAI протестировали на полигоне Японского агентства аэрокосмических исследований (JAXA) в Сагамихаре (в префектуре Канагава), где смоделирована лунная поверхность. Видео с испытательной площадки было опубликовано на YouTube-канале компании-разработчика.
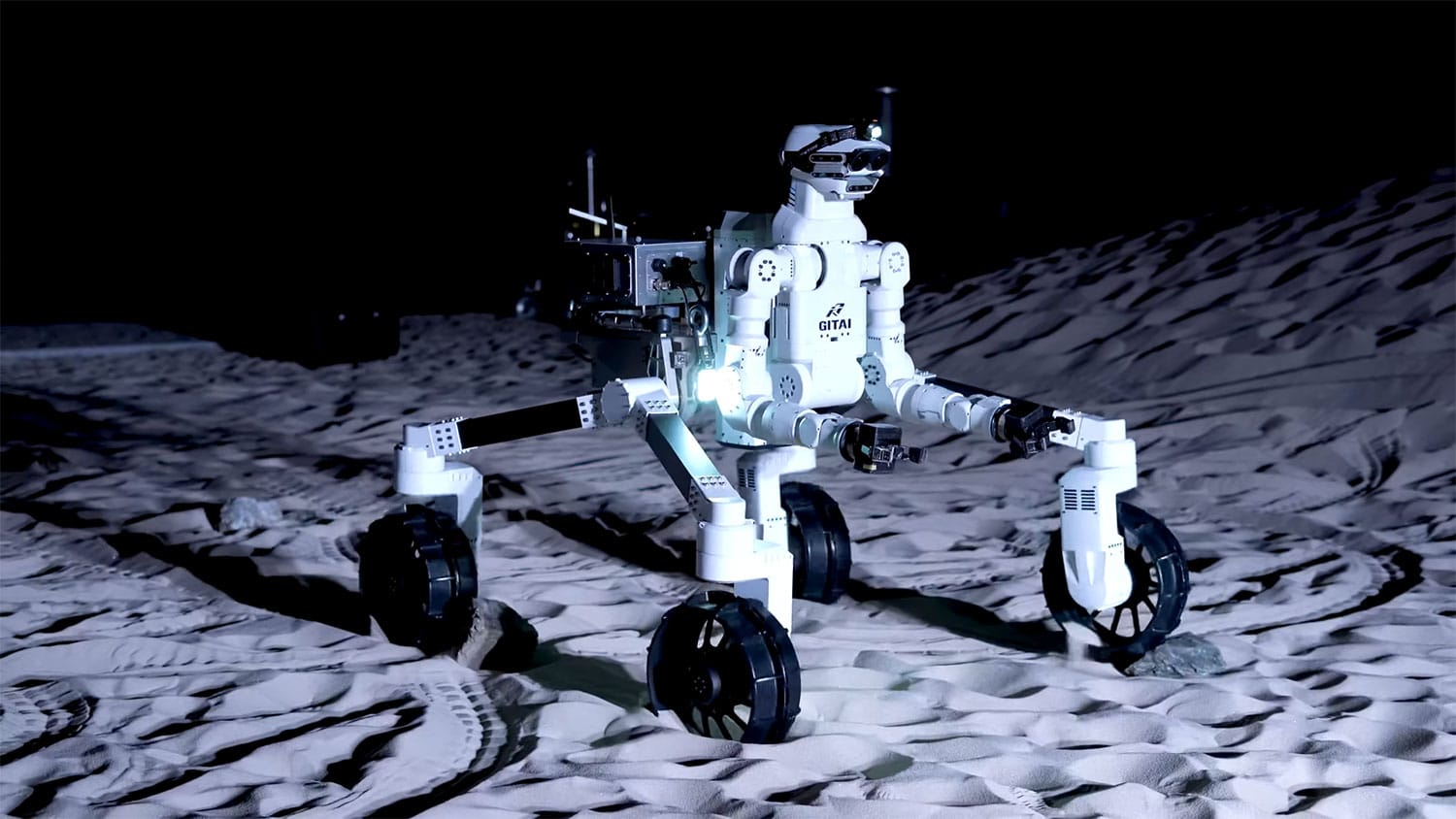
Луноход R1 сможет выполнять на Луне задачи общего назначения, такие как разведка, добыча полезных ископаемых, инспекция, техническое обслуживание, сборка. R1 умеет двигаться боком, осуществлять поворот на месте и сложные маневры благодаря тому, что он оснащен четырьмя колесами, способными поворачиваться под любым углом.
В отличие от других луноходов, этот может похвастаться роботизированными руками со светодиодами и двумя камерами. Однако R1 не может работать в полностью автономном режиме: оператор удаленно управляет ровером и его руками с помощью VR-контроллеров. Манипулятор был протестирован на песчаных и каменистых склонах с уклоном 15° – 20° и смог пройти по ним без проблем.
«В ответ на большой интерес, который НАСА и космическая промышленность США проявляют к добыче лунных ресурсов, с помощью лунного роботизированного ровера GITAI R1 мы выполнили группу задач по сбору реголита. Среди задач: извлечение необходимых инструментов из контейнера, перемещение к нужной точке, сбор лунных образцов и их хранение, возвращение всего оборудования в контейнер и его закрытие. Все они были успешно выполнены», — сказал представитель компании.
Помимо взятия грунта, во время последних испытаний команда GITAI и JAXA протестировала сборку сложных конструкций (солнечных панелей, антенн связи и так далее), которые станут критически важной инфраструктурой лунных баз.
Напомним, в сентябре прошлого года исследовательская группа из Аризонского университета (США) получила $500 тыс. от НАСА на разработку метода добычи полезных ископаемых на Луне с помощью роя автономных роботов-шахтеров.


