
В Испании решили проблему похищенного робота
Инженеры Университета Мигеля Эрнандеса (UMH) в Испании разработали систему локализации MCL-DLF (Monte Carlo Localization—Deep Local Feature), которая позволяет мобильным роботам мгновенно определять свое местоположение даже после принудительного перемещения. Исследование, опубликованное в International Journal of Intelligent Systems, решает так называемую «проблему похищенного робота».
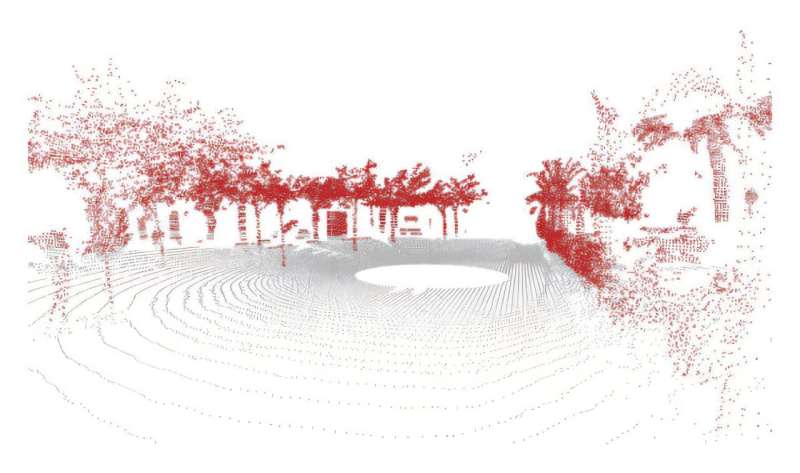
Метод сочетает глобальный и локальный подходы к навигации. Когда робот теряет ориентацию (например, после отключения питания), он сначала сканирует местность 3D-лидаром. На основе глобальных признаков — силуэтов зданий, рядов деревьев — система определяет примерный район. Затем в дело вступает нейросеть: она выделяет уникальные локальные особенности рельефа или архитектуры, чтобы вычислить точную позицию и угол поворота.
«Это аналогично тому, как человек, оказавшись в незнакомом городе, сначала определяет район по крупным ориентирам, а затем ищет конкретную улицу по вывескам и номерам домов», — поясняет ведущий автор исследования Мириам Максимо.
Ключевая особенность разработки — устойчивость к изменениям среды. Тестирование в кампусе UMH в Эльче длилось несколько месяцев и охватило как внутренние помещения, так и открытые пространства. Система успешно сохраняла точность позиционирования при смене сезонов, листвы на деревьях и погодных условий. В отличие от традиционных методов, точность MCL-DLF не деградировала со временем, а вариативность ошибки оказалась минимальной.
Метод применим в автономных транспортных средствах, складской логистике и сервисной робототехнике, где надежность навигации критична для безопасности.
Текст: Майя Цветкова
Изображения: Университета Мигеля Эрнандеса (UMH)
Подписывайтесь на каналы Let AI be в Telegram и «ВКонтакте» — оставайтесь в курсе главных новостей в сфере искусственного интеллекта!


