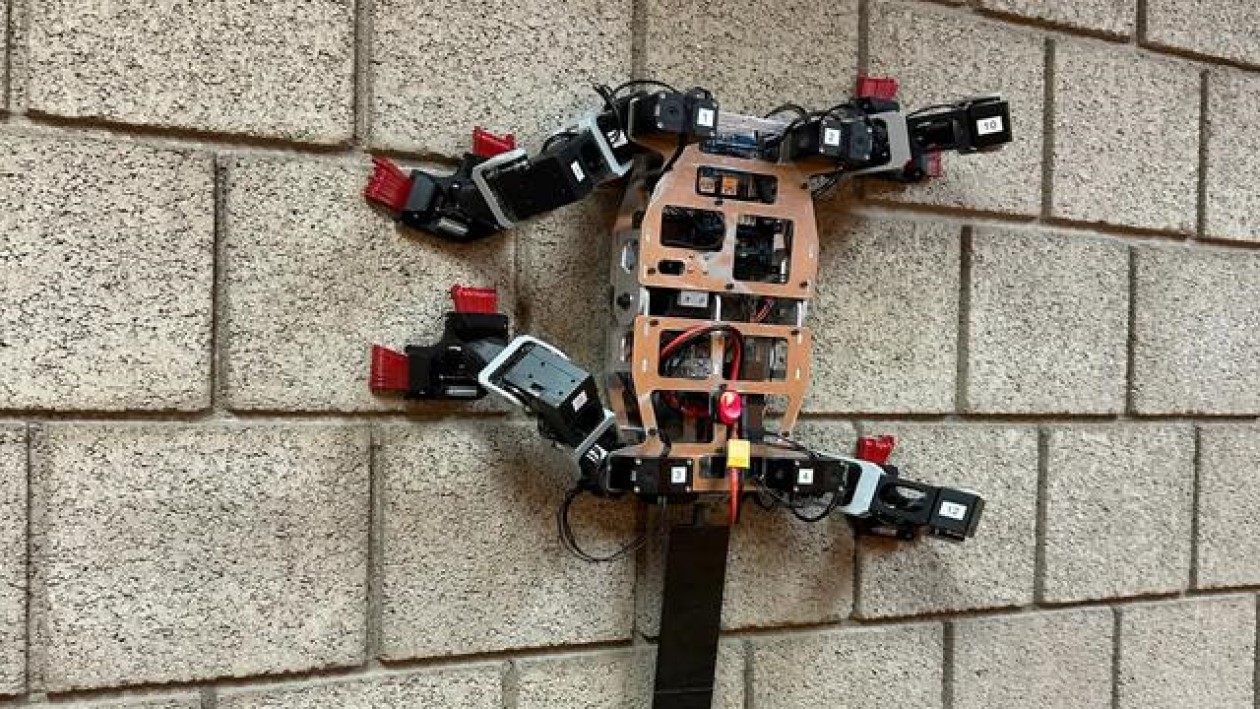
Робот-скалолаз LORIS карабкается по стенам с помощью захватов-крючков
Ученые из Университета Карнеги — Меллона (США) совместно с НАСА создали четвероногого робота-скалолаза LORIS с прицелом на исследование других планет. Он карабкается по шероховатым вертикальным поверхностям с помощью похожих на когти захватов: они состоят из множества крошечных острых крючков и цепляются за небольшие углубления и трещины.
Для подъема по гладким стенам роботы обычно используют вакуумные захваты, но присоски не работают в случае с шершавыми поверхностями.
Новый робот назван в честь лори — животных из семейства приматов. Кроме того, аббревиатура расшифровывается как Lightweight Observation Robot for Irregular Slopes, то есть «легкий робот-наблюдатель для неровных склонов».


Каждый коготь LORIS представляет собой рыболовный крючок, который заключен в пластиковый корпус, напечатанный на 3D-принтере. Используя встроенную камеру глубины и микропроцессор, робот выдвигает конечности таким образом, что, когда захват на одной передней ноге цепляется за поверхность, то же самое движение совершает диагонально противоположная задняя нога. Тем временем другие ноги делают следующий шаг вверх.
Напомним, ранее группа ученых из Корейского института передовых технологий разработала четвероногого робота MARVEL с намагниченными конечностями, который может карабкаться по стенам и ходить по потолку.
Текст: Майя Цветкова
Источник: New Atlas
Изображения: Университет Карнеги — Меллона
Подписывайтесь на каналы Let AI be в Telegram и «ВКонтакте» — оставайтесь в курсе главных новостей в сфере искусственного интеллекта!